Aims and procedure
The DeepMIC project pursues an innovative approach to the development of an intelligent, collaborative assistance system for camera guidance during minimally invasive surgical procedures. Traditionally, the camera is controlled by a human assistant, which can slow down the procedure, restrict the view of critical structures and impair surgical efficiency. DeepMIC addresses these limitations by making camera guidance both more efficient and safer.
The assistance system is characterized by unprecedented adaptivity, intuitive operability and the ability to actively (semi-)automatically cooperate with the surgeon. The aim is a semi-autonomous optimization of the camera position that meets the requirements of the procedure in real time.
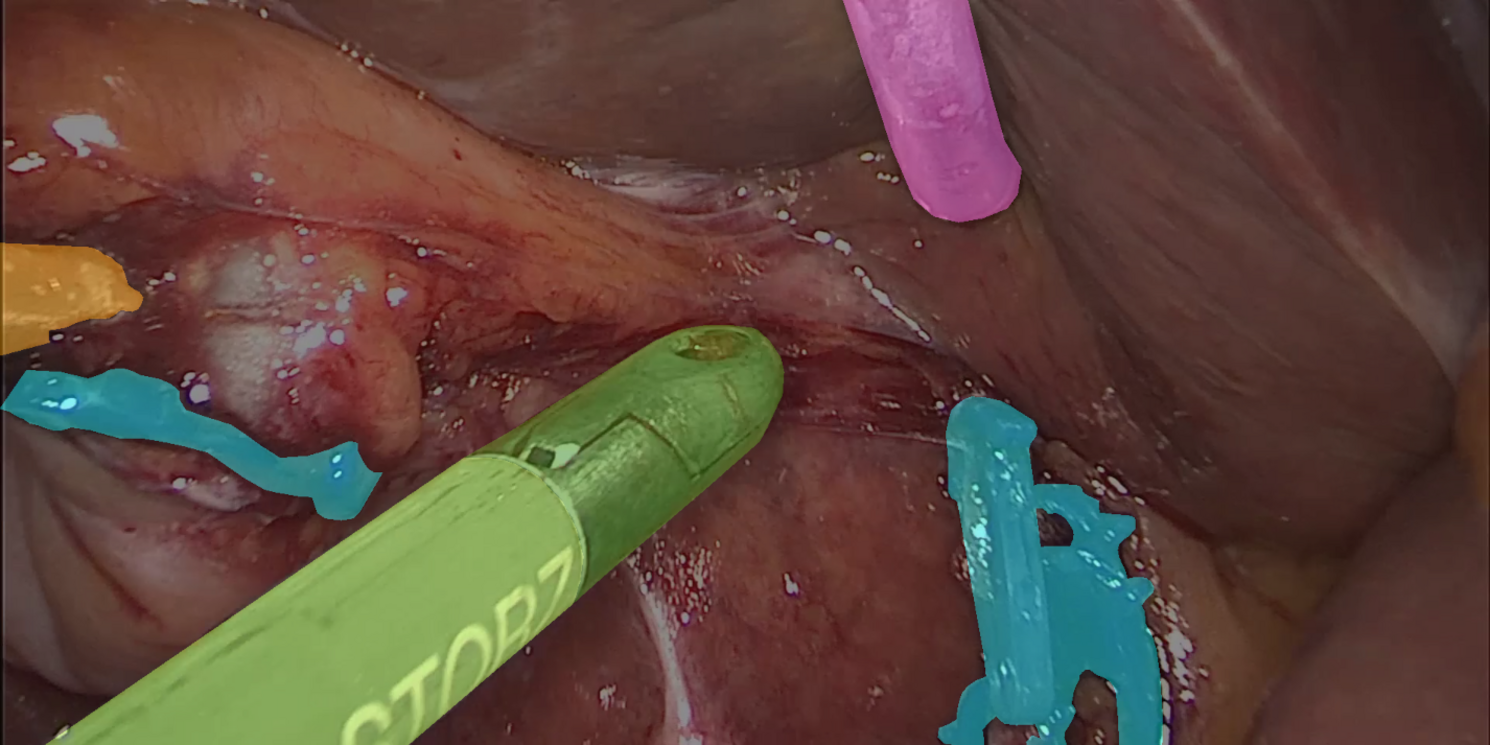
The methodological basis of DeepMIC is the continuous analysis and classification of the endoscopic camera image using deep learning methods in combination with natural speech recognition. In conjunction with knowledge of the surgical workflow, the system enables interaction with the surgeon that is comparable to that of an experienced human assistant and responds directly to surgical requirements.
Cooperation partner
- OTH Regensburg, Regensburg
- AKTORmed GmbH, Neutraubling (coordination)
- MITI, TU Munich
Team OTH Regensburg
- Christoph Palm (Project Manager, Regensburg Medical Image Computing)
- Tobias Rückert (Regensburg Medical Image Computing)